
BADANIA ZASTOSOWANIA REGULATORA PID, FILTRÓW FIR ORAZ KALMANA DO STEROWANIA CZTEROWIRNIKOWYM POJAZDEM LATAJĄCYM
Rozpiętość ramion: 580mm Waga: 1kg Zasilanie: 11.1V Silniki BLDC: TurboJet - C2822/27 Prędkość obrotowa: 13200 obr/min Łopatki śmigieł: GEMFAN 9"x4.7" Sterownik: STM32F4 |

|
W pracy przedstawiono podział wielowirnikowych pojazdów latających oraz inne konstrukcje wykonane na świecie czterowirnikowych pojazdów latających. Przeanalizowano działanie filtrów FIR oraz Kalmana. Zawarty został również opis budowy i zasady działania dwóch najczęściej używanych czujników tego typu: akcelerometru oraz żyroskopu. Dodatkowo opisano budowę oraz sposób sterowania silnikami BLDC. Ostatnim elementem jest analiza użytych interfejsów komunikacyjnych USART oraz I2C. W kolejnym rozdziale opisano budowę konstrukcji czterowirnikowego pojazdu latającego oraz stanowisko na którym zostały przeprowadzone badania. W trzecim rozdziale ukazano schemat układu oraz projekt obwodów drukowanych wykonanych przez autora. Przedostatni rozdział opisuje napisany program służący do kontroli nad czterowirnikowym pojazdem latającym oraz wizualizacji pojazdu w przestrzeni. Ostatni rozdział opisuje przebieg oraz wyniki badań. W pierwszej kolejności przebadano oraz dobrano wartości filtra FIR. Drugim w kolejności był filtr Kalmana. Po dobraniu filtrów zostały strojone regulatory PID dla każdej z osi osobno. Przedstawiono oraz porównano przebiegi dla różnych nastaw. Poniżej przedstawiono wybrane wykresy pokazujące wpływ parametrów na badane filtry.
|
|
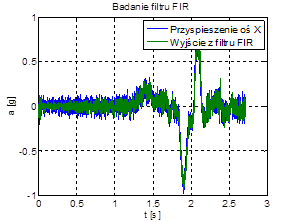
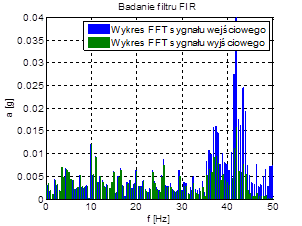
| Przebieg przyspieszenia podczas trwania ruchu oraz odpowiedź filtru FIR przy nastawie 0.9 | |
|
|
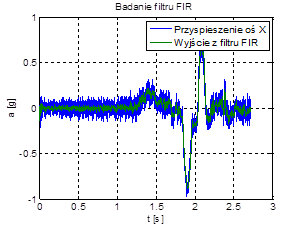
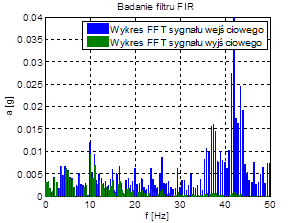
| Przebieg przyspieszenia podczas trwania ruchu oraz odpowiedź filtru FIR przy nastawie 0.01 | |
|
|
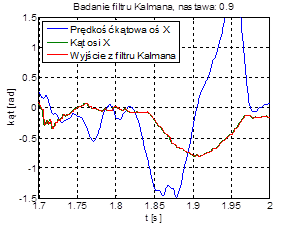
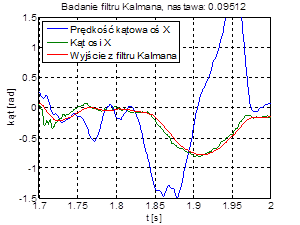
| Wyjście w filtru Kalmana przy nastawie 0.9 i 0.09512 | |